花生收获机
- 产品详情
- 产品参数
品名:4HL-2型花生联合收获机
● 主要功能:一次性完成挖掘、起拔、输送、去土、摘
果、清选、提升、集仓等多道工序;
● 结构形式:自走、轮式、半喂入;
● 配套动力:29.5kW;
● 适用模式:起垄播种、一垄两行;
● 工作效率:1.5-2.5亩/小时。

1、扶禾器
扶禾器是一对反向旋转的尖锥,它的尖部可以划破薄膜和地表皮,扶起倒伏的花生秸秧,以便夹持链条将全部花生秧夹住拔起往后输送。扶禾器的调整:扶禾器要根据垄沟深度和花生秸秧倒伏程度进行调整,正常入土深度以尖锥尖部划破地皮为好,调整时用专用扳手拧松紧固螺栓上下移动尖锥位置,然后固定。
挖掘铲的主要作用是松土、切断花生根系,入土深度以切断花生秧主根为宜,大约在12cm左右,入土过深会造成前进阻力过大浪费动力甚至造成壅土,太浅则会切断花生果造成损失。调整办法:松开挖掘铲柄的紧固螺栓,上下移动铲柄,使挖掘铲刃部距离夹持链条下链片18-21cm,然后固定紧固螺栓。
限深轮的作用是与地面产生仿形滚动行走,保障挖掘铲的入土深度始终与地面保持一定距离。调整办法:摇动限深轮调节摇把,逆时针摇动限深轮下降,反之则上升,调节时以夹持链条距离地面5-7cm为宜,然后固定紧固螺栓,作业时应根据作业地块垄沟深度随时调整限深轮高度。
花生秸秧的拔取和输送是靠两条互相交错的齿形夹持链条完成的,两链条前端呈八字状,前端开口大,用于收拢并夹住由扶禾器扶起的直立花生秧,机器的前进和链条的反方向运转使得前低后高的夹持链条组拔起花生秧向机器后部输送。夹持链条的调整:夹持链条的松紧度会直接影响到夹持链条的工作状态,太松会导致链条卡住、脱轨,太紧会导致运转阻力加大,加速磨损,合适的松紧度应该是用手晃动链条,其晃动间隙为15-20mm。
抖土器是由两根作往复运动的抖土杆组成,在连杆组的带动下两根抖土杆左右晃动花生秸秧,花生秸秧携带的大块泥土和杂质被晃掉,其晃动打击的位置是在夹持链条下方、花生结果部位以上,完成花生秧出土后的第一次清选。调整抖土杆的位置可以改变抖土杆对花生秧的振动程度,往上调振动幅度减小,反之加大;抖土杆往里调使两抖土杆距离靠近则振动加强,反之则减小,要根据实际效果来调整,以抖掉泥土而又不掉果实为宜。不要使抖土杆打击到果实,以免打落果实,在土壤松散时可以拆掉此装置。
摘果系统是由两个作相对运转的摘果辊组成,两摘果辊与输送链条成前低后高结构,与夹持链条呈一定夹角,每个摘果辊上均匀分布四个摘果叶片互成90°,两摘果辊叶片互相交错45 °呈差相排列,输送链条输送的结果部位向下、茎叶向上的花生秸秧进入摘果器以后,摘果辊叶片首先打击根部,然后依次往上部击打,随链条继续输送,摘果辊尾部叶片击打结果部位上方果实直至整个摘果过程结束,花生秧随链条运转输送至收获机外。
清选振动筛是花生联合收获机的第二道清选系统,是由上部栅格式的筛面和下部的小孔筛面构成,配合偏心摇杆结构形成往复振动,摘果辊摘落下的含有部分秸秧、薄膜等的较大杂质经过振动筛栅条初步清选后,花生果实、泥土、叶片等落到下面小孔筛面上,经往复振动,泥土从小孔筛面落下,其它杂质质量较轻,则由风力吹送,排出收获机外,清选后的花生果实则输送到提升器里。
这是花生联合收获机的核心技术部件,也是清选系统的关键部件,它的作用是将振动筛落下的含有剩余泥土的花生果再次清选、输送、提升至果仓。选用空心销轴链条配以栅条组成可以循环转动的输送链条筛,栅条上每隔一段距离装有提升挖斗,链条平行运动时起筛选作用,垂直运动时起提升作用,而且不易堵塞,清理简单。
9、自卸果仓
此花生联合收获机配备液压式自卸果仓,果仓的翻转是液压操作,拨动驾驶座右边的操纵杆控制果仓的翻转和回位。液压自卸果仓,待收获完成后可以将花生果直接卸到用户的运输车里。
产品优势
1.调整作业轮距,适合的种植模式更广;
2.加大果仓,持续作业时间更长;
3.增加传送滚动筛,集果更均匀;
4.加长摘果辊、摘果更干净;
5.加长、加宽振动筛,清选效果更好;
6.优化传动系统,无故障作业时间更长;
7.优化风机,风机口方向可调,适应的花生长势情况更多。
适用环境
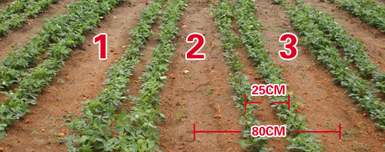
花生地为起垄机播,垄距80±5厘米,行距25±5厘米,行距越小越利于收获。收获时,车轮行走在1和3垄沟内,收获2和3之间的两行花生。
在土地含水率10%左右,土壤松散,无丛生和蔓类杂草,花生生长正常,秸秧自然直立,株高35-55厘米,无死秧烂果,无虫害导致果实脱落现象,4HB-2A型花生联合收获机收获效果可符合下表:
| 总损失率 | 含杂率 | 破碎率 | 秸秧完整率 |
| ≤3% | ≤5% | ≤1% | ≥98% |
新用户花生收获机操作
新用户使用后采访